Join the Menttor community
Access accelerated AI inference, track progress, and collaborate on roadmaps with students worldwide.
Dexterous Manipulation
Andrychowicz, M., Baker, B., Chociej, M., Jozefowicz, R., McGrew, B., Pachocki, J., ... & Zaremba, W. (2020). Learning dexterous in-hand manipulation. The International Journal of Robotics Research, 39(1), 3-20.
Read Original Paper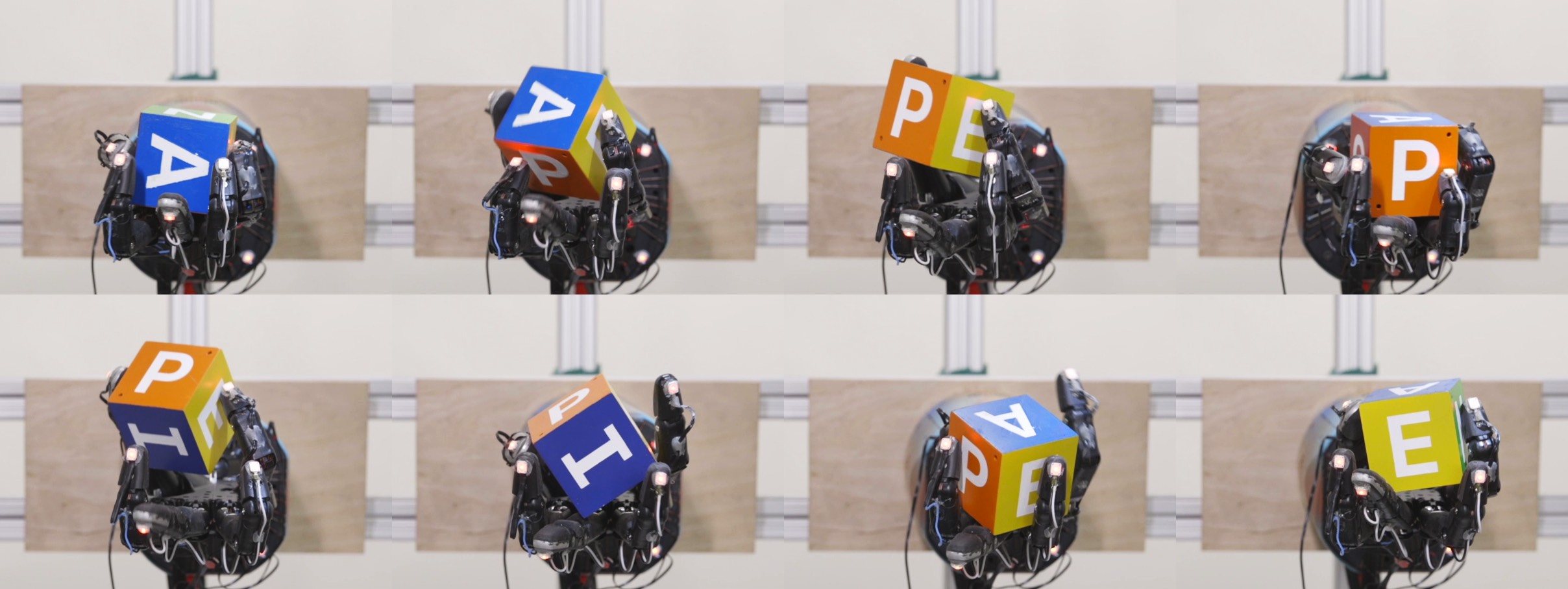
The 2018 paper on 'Learning Dexterous In-Hand Manipulation' demonstrated that a humanoid robot hand could learn to perform complex tasks, such as reorienting a block, using reinforcement learning in simulation. One of the greatest challenges in robotics is the 'reality gap'—the difference between the idealized physics of a simulator and the noisy, unpredictable nature of the real world. The researchers at OpenAI proposed that instead of trying to build a perfect simulator, they could train an agent on a massive variety of imperfect ones. It was a shift toward using diversity as a form of robustness.
Domain Randomization
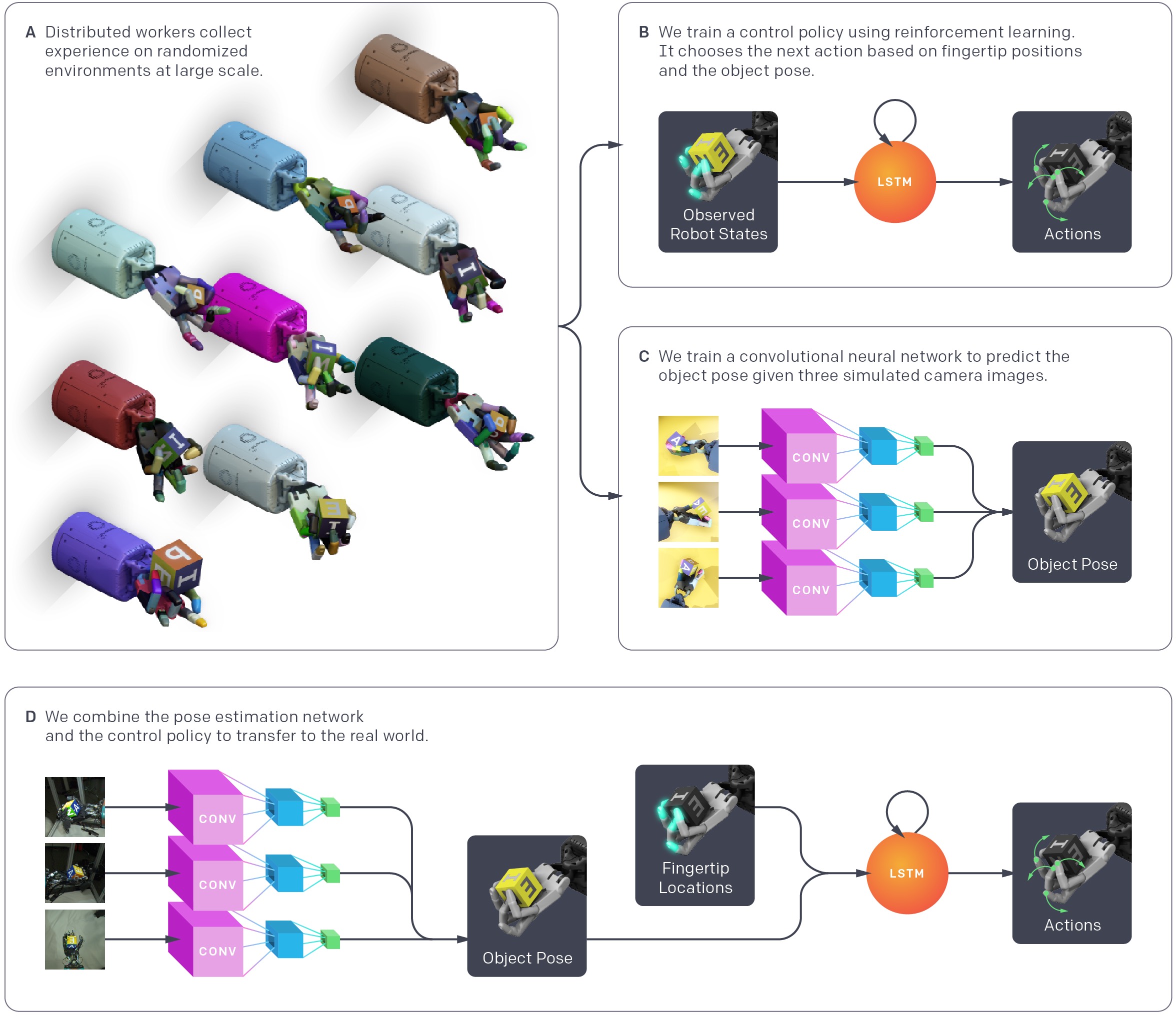
System overview of the sim-to-real transfer process using domain randomization.
The technical shift was the use of extreme 'domain randomization.' By varying every physical parameter of the simulation—such as friction, gravity, and object mass—the researchers forced the agent to learn a policy that could handle any environment. As the paper states, 'If the policy is robust enough to perform the task in a large range of environments, it may also be robust enough to perform it in the real world.' This allowed for a direct transfer of the learned behavior to a physical robot without any further fine-tuning. It revealed that an agent’s ability to generalize is directly tied to the variety of situations it encounters during training.
Computing Scale
The reasoning behind this approach was the need for massive amounts of experience. The agent required thousands of years of simulated interaction to master the complexities of human-like manipulation. By distributing the training across hundreds of GPUs, the researchers were able to compress this time into a few days. This demonstrated that the progress in robotics is not just about better algorithms, but about the ability to scale computation to match the complexity of the task. It suggests that physical intelligence may be a data-hungry process that relies on large-scale exploration.
The Embodiment Challenge
The success of the dexterous hand highlights a fundamental question in AI: how much of intelligence is tied to the physical body? By learning to use a complex, 24-degree-of-freedom hand, the agent developed behaviors that resemble human motor skills. This reveals that the constraints of the body shape the nature of the learning process. It raises the question of whether a genuine understanding of the world requires an embodied experience, and how we can continue to bridge the gap between digital reasoning and physical action.
Dive Deeper
OpenAI Blog: Dactyl
OpenAI • article
Explore ResourceDexterous Manipulation Paper
arXiv • article
Explore Resource